|
Currently, I am a PhD candidate in the Computer Vision Group at Tampere University, Finland, where I am working on 3D computer vision and machine learning, specializing in 6D object pose estimation and tracking, under the supervision of Prof. Esa Rahtu and Prof. Janne Heikkilä. During my PhD, I was a guest researcher hosted by Prof. Marc Pollefeys in the CVG group at ETH Zurich, collaborating with Dr. Denys Rozumny and Prof. Martin R. Oswald on simultaneous 6D object pose tracking and object reconstruction based on 3D Gaussian Splatting.I obtained my Master's degree in Data Engineering and Signal Processing from Tampere University (formerly Tampere Univeristy of Technology) supervised by Prof. Joni Kämäräinen and Dr. Ke Chen in 2017. Prior to that, I received my Bachelor's degree in Software Engineering in 2015, from Sichuan University, Chengdu, China. Email (dingding.cai@tuni.fi) / LinkedIn / Google Scholar / CV |

|
|
I'm interested in various 2D/3D computer vision tasks, in particular, 6D object pose estimation and tracking, 3D scene understanding, and 3D object reconstruction. |
|
|
Dingding Cai, Janne Heikkilä, Esa Rahtu 3DV, 2025 Project page / Paper / Code We propose a unified framework for locating and estimating the 6D pose of novel objects. The proposed apporach leverages object co-segmentation and 3D Gaussian splatting for RGB-based 6D object pose estimation. |
|
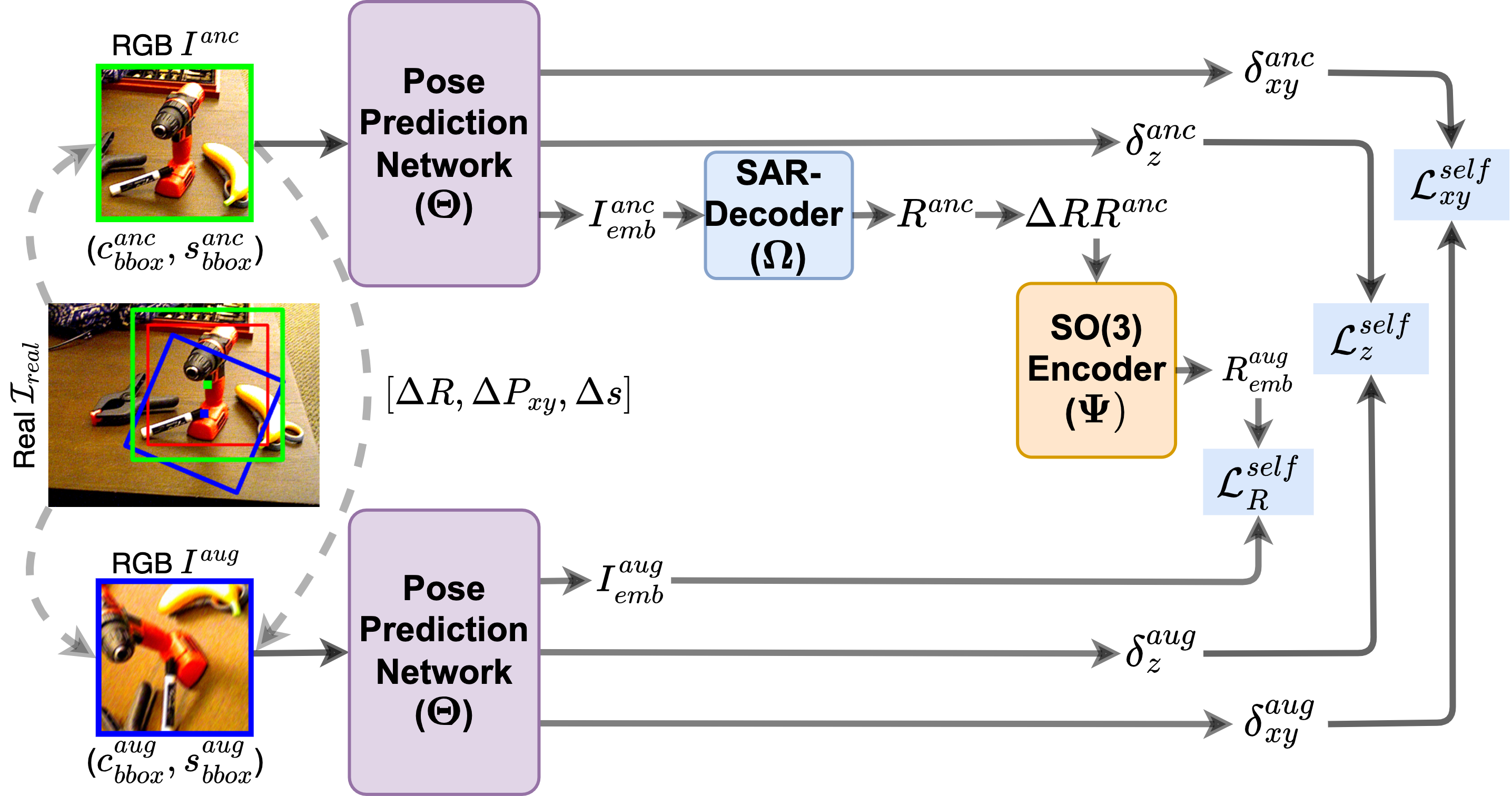
Dingding Cai, Janne Heikkilä, Esa Rahtu SCIA, 2023 Paper We propose a practical self-supervised domain adaptation approach that takes advantage of real RGB(-D) data without needing real pose labels. |
|
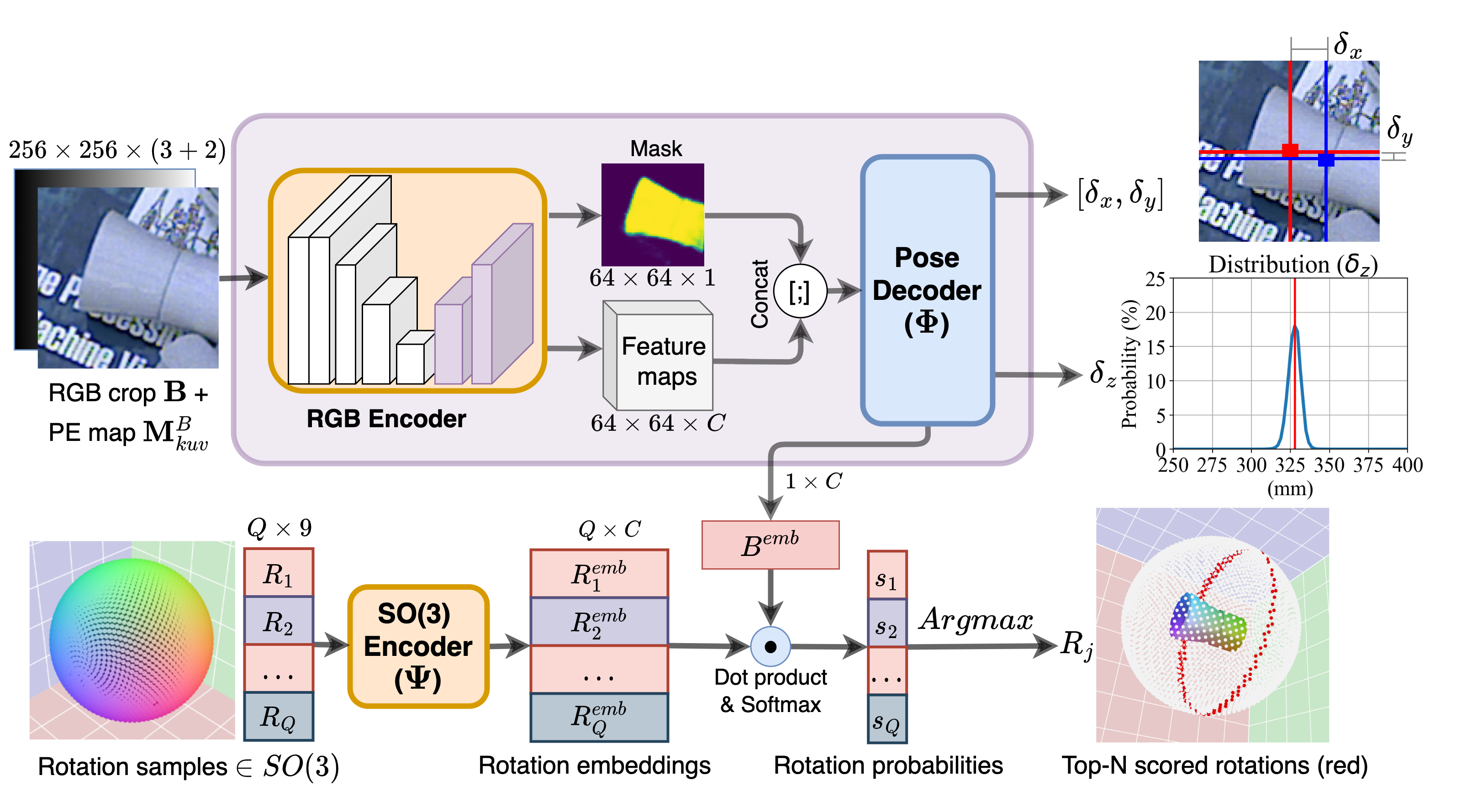
Dingding Cai, Janne Heikkilä, Esa Rahtu 3DV, 2022 Paper / Code We present an efficient symmetry-agnostic and correspondence-free framework, referred to as SC6D, for 6D object pose estimation from a single monocular RGB image. SC6D requires neither the 3D CAD model of the object nor any prior knowledge of the symmetries. |
|
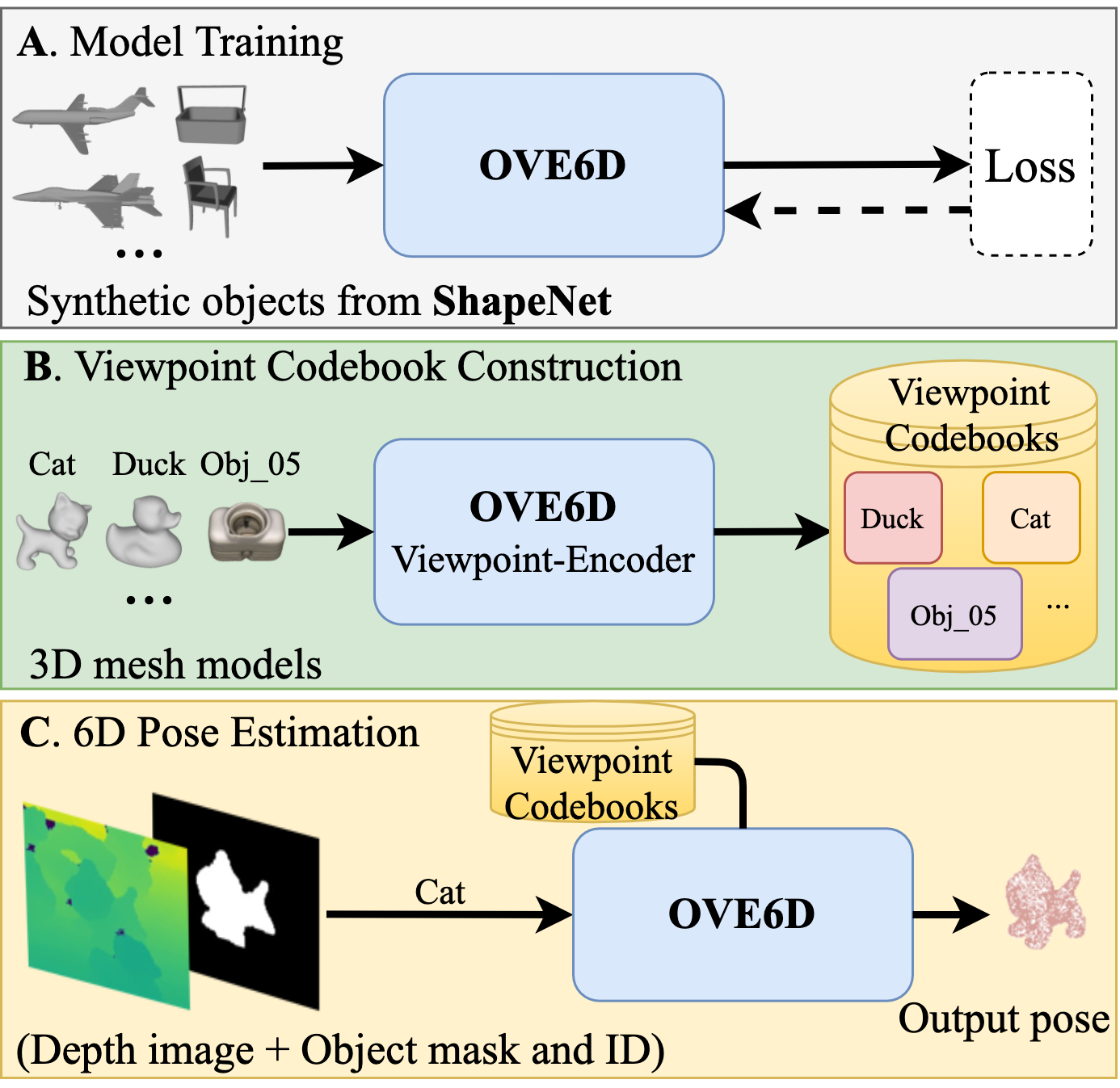
Dingding Cai, Janne Heikkilä, Esa Rahtu CVPR, 2022 Project page / Paper / Code We propose a universal object 6D pose estimation model, called OVE6D, purely trained on synthetic 3D objects from ShapeNet and generalizing remarkably well to unseen objects without needing any parameter optimization. |
|
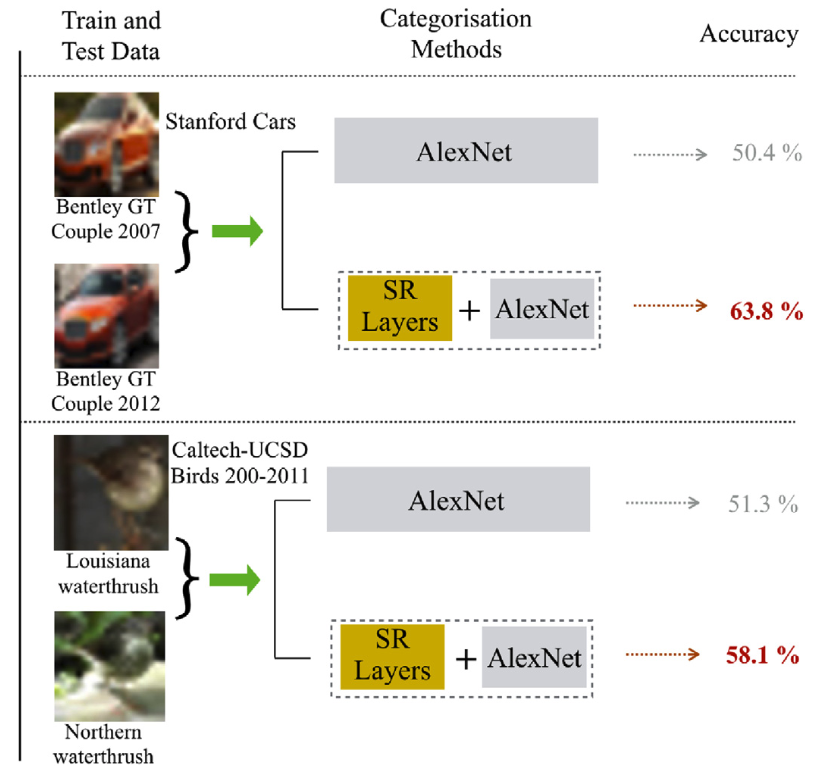
Dingding Cai, Ke Chen, Yanlin Qian, Joni-Kristian Kämäräinen Pattern Recognition Letters, 2019 Paper / Code We propose a novel resolution-aware deep model which combines convolutional image super-resolution and convolutional fine-grained classification into a single model in an end-to-end manner. |
|
This webpage template is based on link. |